
Информация о работе
Автор:
Виниченко Максим Станиславович
Научный руководитель:
Ермоленко Татьяна Ивановна
Учебное заведение:
МАОУ школа №11 г.Белогрск
Год защиты:
2026-03-29
Класс:
8
Достижения работы
Первая работа автора в библиотеке
Достижение получено за работу "Роботы"
был создан робот
Представленные в «Библиотеке» работы могут не соответствовать требованиям (к оформлению и структуре) представленным у нас на сайте (ВоркПроект), так как каждое учебное заведение:
- Устанавливает собственные требования к оформлению текста работы, но текст работы должен иметь хотя бы примерное единообразие оформления.
- Определяет структуру «Введения», «Заключения», при этом оба структурных элемента должны иметь обязательные разделы.
- Указывает количество глав – обязательным требованиям является наличие не менее 2 глав (не путать с параграфами и пунктами).
- Назначает минимальный и максимальный объём проекта, минимальный объем 10 страниц.
У нас на сайте представлены общие требования и рекомендации к проектным работам, характеристика, примеры и рекомендации по разработке, но итоговый вариант проектной работы всегда зависит от конкретного учебного заведения.
Размещённые работы представлены в том виде в каком их добавил автор работы, мы не вносим корректировки в текстовую часть и оформление, при этом могут наблюдаться незначительные отклонения в оформлении текста связанные с изменением формата документа.
AI.WorkProekt — ваш ИИ-помощник
Генерация отчетов, анализ данных, создание презентаций и документов с помощью нейросетей
от 5 рублей* *зависит от выбранного модуля
Текст работы
МУНИЦИПАЛЬНОЕ АВТОНОМНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «ШКОЛА № 11 ГОРОДА БЕЛОГОРСК»
ИНДИВИДУАЛЬНЫЙ ИТОГОВЫЙ ПРОЕКТ
на тему
«Роботы»
Работа обучающегося 8 класса
Виниченко Максима Станиславовича
Руководитель проекта:
Ермоленко Татьяна Ивановна
Работа допущена к защите «___»________2026 г.
Подпись руководителя проекта _____________/_______________________
г. Белогорск, 2026 г.
Содержание:
|
|
|
Стр |
|
1. |
Введение |
3-4 |
|
2. |
Предыстория |
5-7 |
|
3. |
Виды роботов |
8-12 |
|
3.1. |
Типы роботов |
8-9 |
|
3.2. |
Типы мобильности |
11-12 |
|
4. |
Создание робота |
13-15 |
|
5. |
Приложение |
14-19 |
|
6. |
Информационные источники |
20 |
1. Введение
Если вы можете представить мир, где роботы не просто служат, а становятся нашими партнёрами, вы можете представить любое будущее, в котором технологии и человечество идут рука об руку.
Зачем человеку создавать машины с искусственным интеллектом, которые могут заменить человека во всём?
В широком смысле понятие «робот» включает в себя, прежде всего представление о некотором механическом аппарате, способном с той или иной степенью самостоятельности перемещаться в пространстве. Робот, как машина состоит из двух частей – исполнительных систем и информационно-управляющей системы с сенсорной системой. В свою очередь исполнительные системы включают манипуляционную систему и системы передвижения, имеющиеся только у подвижных роботов. Считается, что первый проект машины, способной заменить человека, принадлежит Леонардо да Винчи. Среди его бумаг был найден эскиз робота, который мог приподниматься, садиться, двигать руками и крутить головой. Правда, до сих пор неизвестно, была ли задумка претворена в жизнь. Более того, уже сегодня в быту люди используют множество роботов различного назначения: от робота-пылесоса до робота-художника.
С давних пор слово «робот» ассоциируется у человека с образом человекоподобного существа. Все механические устройства, предназначенные для передвижения в пространстве – танки, тракторы, автомобили и другие – выполняют свои функции непосредственно под управлением человека. Не имеют отличий от вышеперечисленных и разные радиоуправляемые аппараты – человек хотя и находится на расстоянии, но контролирует каждый «шаг» дистанционно управляемых машин. Потребности в мобильности роботов будут быстро возрастать по мере того, как применение роботов начнёт выходить за рамки обрабатывающих отраслей промышленности и распространяться на смежные отрасли производства, а также в непромышленных отраслях.
Актуальность: Изучение роботов играет огромную роль в современной науке. С каждым днём человеку для комфортной жизни требуются всё более модернизированные роботы. Вскоре человек совсем не сможет прожить без роботов.
Гипотеза – роботы - это будущее нашего мира.
Цель проекта: изучить информацию про роботов, создать робота.
Задачи проекта:
1. Собрать информацию про роботов.
2. Обработать информацию и сделать презентацию.
3. Создать робота.
Объект исследования: роботы
Предмет исследования: изучение роботов.
Методы исследования: изучение информации.
2. Предыстория
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и закопал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею. Также в мифе про Гефеста рассказывается, как он создал себе различных слуг.

Еврейская легенда рассказывает о глиняном человеке — Големе, который был оживлён пражским раввином Йехудой бен Бецалелем при помощи каббалистической магии.
Похожий миф
излагается в скандинавском эпосе Младшая Эдда. Там рассказывается о глиняном
гиганте Мёккуркальви, созданном троллем Хрунгниром для схватки с Тором, богом
грома. 
Автоматизация
и роботизация производства в капиталистическом мире началась в 50-е годы XX
века. Именно к тому времени можно отнести появление первых промышленных
роботов. Они осуществляли сборку оборудования, и простейшие монотонные
операции.
Первый такой робот был разработан изобретателем самоучкой Джоржем Деволом в
1954 году. Робот-манипулятор весил две тонны и управлялся программой,
записанной на магнитном барабане. Система получила название Unimate,
на новое устройство был оформлен патент и в 1961 изобретатель основал
компанию Unimation.
Первый робот был установлен на заводе Дженерал Моторс (на литейном участке) в 1961 году. Затем новинка была опробована заводами Chrysler и Ford.
В 90-е появился контроллер с интуитивным интерфейсом управления, которым мог управлять оператор, он мог изменять параметры и регулировать режим работы. С тех пор возможности управления роботами и их функции только развивались, увеличивалась их сложность, скорость, число осей, стали использоваться различные материалы, шире становились возможности разработки и управления, было сделано несколько первых уверенных шагов в сторону искусственного интеллекта.
В то же время СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских Новочеркасского Политеха. Ранее, в 12 лет, создал маленький радиоуправляемый броневик, стрелявший фейерверками. На "робота" Мацкевича обратили внимание власти, и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
На рубеже 30 - 40-х гг. XX в. в СССР также появились автоматические линии для обработки деталей подшипников, а в конце 40-х гг. XX в. впервые в мировой практике было создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1966 в Воронеже был изобретен манипулятор для укладки металлических листов, в 1968 году в Ленинграде разработали подводный робот "Манта" с чувствительным захватным устройством - в дальнейшем он совершенствовался. В 1969 году в ЦНИТИ Миноборонпрома приступили к разработке промышленного робота «Универсал-50». В дальнейшем активно внедрялись автоматизированные системы на крупные производства.
В 90-е годы наблюдался некоторый спад. Внедрение роботов, использующих существующие в то время технологии, на производство не принесло ожидаемой прибыли и финансирование некоторых крупномасштабных проектов было приостановлено. По ряду причин - и экономических, и социальных - ожидаемого бума не произошло, они остались как нишевая продукция для автосборочных и ряда других производств.
Остановить уже развитие невозможно и всем странам, желающим быть в авангарде мировой промышленности, приходится это принимать и догонять.
3. Виды роботов
3.1. Типы роботов
Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.
По строению:
Андроид (человекообразный робот);
Биоробот — робот, обладающий биологическими функциями и разумом, либо человек с имплантированными роботизированными частями.
В зависимости от функционального назначения, выделяют следующие типы роботов:
Промышленный робот - появление станков с числовым программным управлением (ЧПУ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 1970-х годах микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Транспортный робот - автоматическая машина, представляющая собой совокупность манипулятора, перепрограммируемого устройства управления и ходового устройства.
Подводный робот - роботы, автономные и телеуправляемые, предназначенные для работы под водой.
Телеуправляемые роботы (ТНПА) или ROV управляются оператором по кабелю, по нему же передается видеопоток, а иногда и питание.
Бытовой робот - одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.
В сентябре 2005 года в свободную продажу поступили первые человекообразные роботы «Вакамару» производства фирмы Mitsubishi. Робот стоимостью в 15 тысяч долларов способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением.
В начале XXI века получили популярность роботы-уборщики, представляющие собой по сути автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Боевой робот - устройства автоматики, заменяющие человека в боевых ситуациях для сохранения человеческой жизни или для работы в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п..
Летающий робот - эти летающие роботы, также известные как беспилотные летающие аппараты, или БПЛА, уже помогают преобразовывать различные отрасли, в том числе сельское хозяйство и в военной области.
Медицинский робот - роботы находят применение в медицине; в частности, разрабатываются различные модели хирургических роботов. Ещё в 1985 году робот Unimation Puma 200 был использован для позиционирования хирургической иглы при выполнении биопсии головного мозга, проводившейся под управлением компьютера. В 1992 году, разработанный в Имперском колледже Лондона, робот ProBot впервые осуществил операцию на предстательной железе, положив начало практической роботизированной хирургии. В 2000 году компания Intuitive Surgical начала серийный выпуск роботов Da Vinci, предназначенных для лапароскопических операций.
Аптечный робот - мини-складское оборудование, которое устанавливается в аптеке, аптечных складах и медицинских учреждениях для оптимизации хранения, поиска и выдачи медикаментов к рабочему месту фармацевта (первому столу) или для продажи непосредственно покупателю.
Микроробот - это область микроробототехники, в частности проектирование мобильных роботов с характерными размерами менее 1 мм. Это название также может быть использовано для роботов, способных к работе с компонентами размером в микрометры.
Наноробот – роботы, размером сопоставимые с молекулой (менее 100 нм), обладающие функциями движения, обработки и передачи информации, исполнения программ. Кроме того, даже обычных роботов, которые могут перемещаться с наноразмерной точностью, можно считать нанороботами.
Персональный робот – тип роботов, которые в отличие от промышленных роботов будут компактны, недороги и просты в использовании. Для распознания эмоций и общения с пользователями на естественном языке робот использует вопросно-ответную систему искусственного интеллекта суперкомпьютера IBM Watson.
Робот-игрушка – Маленькие роботы, на пульте управления, либо запрограммированные на определённые действия.
Промо-робот - Проект фонда Сколково из Перми, автономный разумный робот с характером. Он предназначен для работы в местах повышенного скопления людей, в которых он помогает людям с навигацией, отвечает на любые вопросы, транслирует промо-материалы и запоминает каждого, с кем приходилось общаться.
Робот-официант – Он встречает гостей заведения, мило улыбаясь и подмигивая глазами, приглашает занять столик. После чего сам приносит меню и предлагает сделать заказ. Заказанные Вами блюда робот подносит к Вашему столику, а после предлагает забрать у Вас со столика грязную посуду.
Робот-программа - Представьте себе клетчатое поле (как лист из тетради в клеточку) на котором находится некий объект, который мы назовем Робот. Используя специальные команды, мы можем этим Роботом управлять — перемещать его по клеткам, закрашивать клетки. И в большинстве случаев наша задача будет заключаться в том, чтобы написать такую программу для Робота, выполняя которую он будет закрашивать определенные клетки.
Робот-экскурсовод - встречает посетителей музея при входе и предлагает провести экскурсию. Руки робота активно жестикулируют при общении, он может поздороваться с посетителем за руку, подмигивает глазами и показывает сердечки, фотографирует и, благодаря встроенному фото принтеру, распечатывает фотографии.
Социальный робот - робот, способный в автономном или полуавтономном режиме взаимодействовать и общаться с людьми в общественных местах.
Шаробот - подвижный робот, использующий для передвижения единственное сферическое колесо (т. е. шар), и постоянно самобалансирующий на нём как в движении, так и в покое.
Робот-учитель - один из первых образцов робота-учителя был разработан в 2016 году молодыми учёными Томского политехнического университета. В мае 2016 года пресс-служба университета сообщила, что с помощью мобиробота учащиеся лицея при вузе смогут получать теоретические и практические знания по математике, физике, химии и информатике начиная с осени того же года.
Зооробот – робот, внешне напоминающий какое-либо животное.
3.2. Типы мобильности роботов
Можно выделить 5 принципиально различных типов мобильности роботов:
· Наземные
· Воздушные
· Водоплавающие
· Подземные
· Космические
Также существует мобильные роботы специального назначения (МРСН).
К таким роботам обычно относят роботов, способных автоматически перемещаться по неровному полу, на открытом воздухе или по каким-нибудь другим специфическим поверхностям.
4. Создание робота
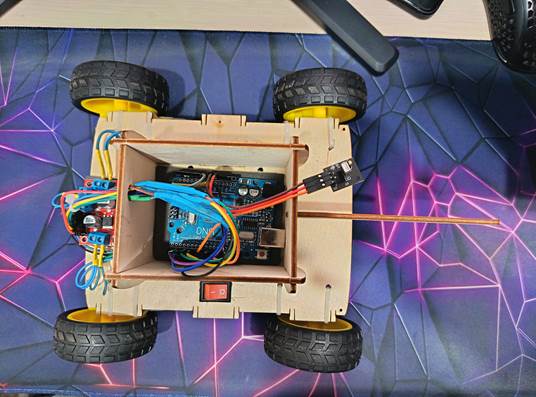
Я решил попробовать создать программируемого робота. Сначала я в доске просверлил отверстия для крепежа моторов и проводов с платами, закрепил моторы хомутами в эти отверстия и закрепил отсек для батареек. Платы закрепил саморезами. Припаял провода к моторам, к драйверу, проводки от драйвера присоединил к плате Arduino Uno. Просверлил отверстие для тумблера и вставил его в цепь. Подключил приемник ИК-сигнала к Arduino и закрепил приемник на флаге России. Сделал отверстие, куда спрятал все провода. Запрограммировал Arduino, привязал пульт управления и настроил движение вперед, назад, влево, вправо, а также увеличение и уменьшение скорости. Установил на двигатели колеса
Я решил попробовать создать программируемого
робота. Сначала я в доске просверлил отверстия для крепежа моторов и проводов с
платами закрепил моторы хомутами в эти отверстия и закрепил
отсек для батареек. Платы закрепил саморезами. Припаял провода к моторам к
драйверу, проводки от драйвера присоединил к плате Arduino Uno.
Просверлил отверстие для тумблера и вставил его в цепь. Подключил приёмник ИК
сигнала к Arduino и
закрепил приёмник на флаг России. Сделал отверстие куда спрятал все провода третьи проводки
от транзисторов собрал в пучок с проводками от фоторезисторов и припаял к
минусу элемента питания. Свободные проводки от двигателей собрал в пучок и припаял
к плюсу элемента питания. Прикрепил двигателя, мебельный ролик и крепление для
элемента питания клеевым пистолетом к доске, попутно этим же пистолетом
закрепил провода, чтобы они не мешались. Установил
на двигателя колёса.
Вывод: Моя гипотеза подтвердилась. Создание роботов играет огромную роль в современной науке. С каждым днём человеку для комфортной жизни требуются всё более модернизированные роботы. Вскоре человек совсем не сможет прожить без роботов. Роботы - это будущее нашего мира.
5. Приложение
5.1. Практическая работа «Создание робота»
1. Материалы
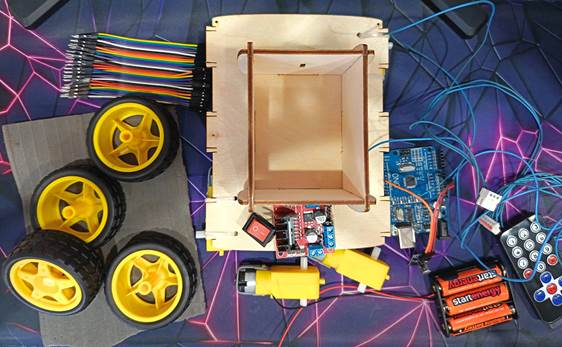
2. Инструменты

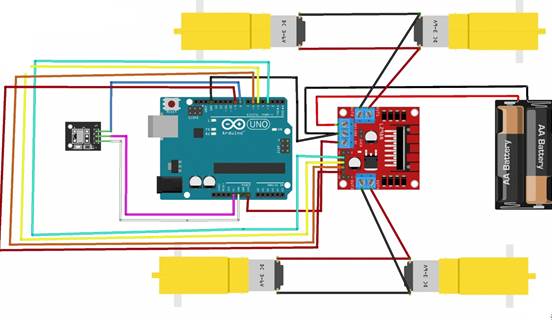
3. Схема соединения проводов
5. Робот
5.2. Виды роботов
6. Транспортный робот
 |
7. Бытовой робот

8. Подводный робот

9. Летающий робот

10. Медицинский робот

11. Робот – игрушка

12.Робот-программа
13. Зооробот

6. Информационные источники
1. https://www.youtube.com/watch?v=w8SkyM3zIHM
2. http://www.servomh.ru/stati/robototehnika-istoriya-osnovnye-zadachi-robototehniki
4. http://www.openclass.ru/wiki-pages/123792
5. http://www.openclass.ru/wiki-pages/123792
6. http://pedagogical_dictionary.academic.ru
7. http://learning.9151394.ru/course/view.php?id=17
8. https://ru.wikipedia.org/wiki/Робот
9. https://ria.ru/20110827/424738475.html
10. https://www.docsity.com/ru/roboty/1081008/
Инструменты AI.WorkProekt
Генератор отчетов
Анализ данных
Диаграммы
Нейросети
от 5 рублей* *зависит от выбранного модуля
Узнать подробнее






